")
")





ARCHEOSUb
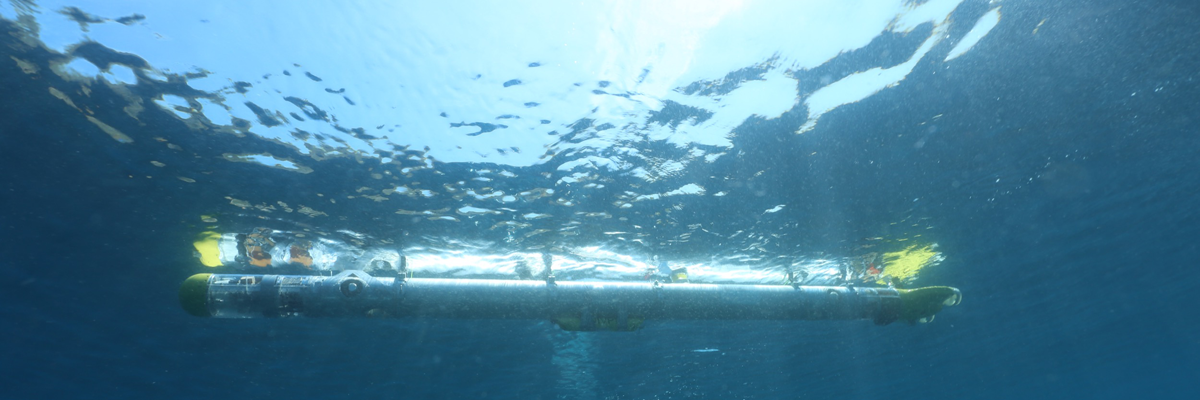
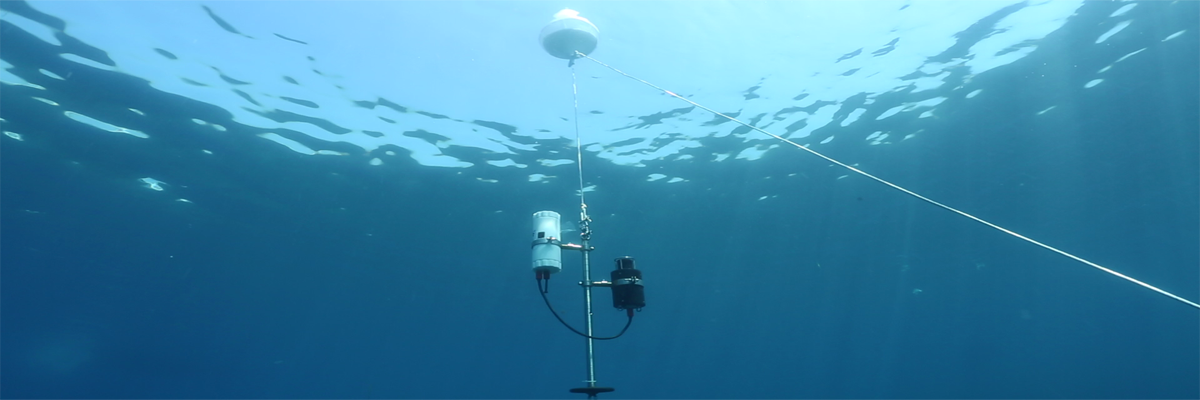
The ARCHEOSUb (Autonomous underwater Robotic and sensing systems for Cultural Heritage discovery Conservation and in situ valorization) project aims to develop products and services in support of the discovery of new Underwater Cultural Heritage (UCH) sites and of the surveying, conservation, protection, and valorization of new and existing ones. The project will use an in-situ underwater sensor network deployed at a site for real-time monitoring and surveillance. The network will comprise low-cost Autonomous Underwater Vehicles (AUVs) designed by the consortium to be sent to sites of interest, relying on the network nodes for accurate localization. Real time communication of multimedia data will be one of the outcomes of this project. The system will also provide localization services for divers equipped with underwater modems and tablets with information on the UCH site for a more immersive visit experience.
The project activities will be performed by the Blue Lab Team, a multidisciplinary project team built on the skills of young scientists, in particularly post-graduates, and on the experience of advisors with extensive knowledge of research, business development and of project teamwork of the highest quality.
Technological and commercial results will include:
- A low cost, high performance AUV supporting archaeologists during all steps of a typical campaign.
- A simple yet highly accurate acoustic localization system for AUV and divers navigation. The approach will overcome current expensive sensors and methods for vehicle positioning, while providing accurate geo-referencing of archaeological targets of interest.
- Innovative low computational complexity image and video algorithms and adaptive underwater networking for acoustic realtime transmission of AUV site acquisitions and of data from underwater cameras.
- A user-friendly graphical user interfaces and powerful software for the control of the underwater system (AUV and network nodes), to ease the access of the archaeologists to the developed technologies.
- Services for the valorization of UCH sites with itineraries for divers.
The ARCHEOSUb aims to develop innovative solutions with the potential to reach the market by 24 months after project end, based on an investor ready business plan, and will establish durable smart partnerships and expand knowledge and competences for the discovery, protection, valorization and fruition of underwater cultural heritage.
The project aims to bring a number of key results of FP7 projects GENESI, CLAM, ARROWS, and of the award-winning project SUNRISE to commercial maturity.